
Wissenswertes

Wissenswertes · 27. Mai 2025
Kein Chip, kein Code – und trotzdem ein Roboter, der sich orientiert, entscheidet und auf seine Umwelt reagiert? In dieser Blog-Serie erfährst du, wie du mit einfachen analogen Bauteilen einen echten „Instinkt-Roboter“ baust – inspiriert von der Natur und fundiert durch mein eigenes Patent. Wir starten mit der Idee hinter der Technik, bauen eine funktionierende Schaltung auf, entwerfen dazu einen simplen Roboter – und schauen uns dann clevere Varianten für verschiedene Anwendungen...

Wissenswertes · 19. Juni 2024
Stell dir vor, Roboter könnten Lichtverhältnisse genauso wahrnehmen wie wir Menschen (Die Welt der Helligkeitswahrnehmung). Anstatt sich nur auf absolute Helligkeitswerte zu verlassen, könnten sie relative Helligkeitsunterschiede nutzen, um ihre Umgebung besser zu verstehen und darauf zu reagieren. Doch wie lässt sich diese Fähigkeit technisch realisieren und welche Vorteile bringt sie mit sich? Die Idee ist simpel, aber genial: Kombiniere zwei oder mehrere Sensoren mit unterschiedlichen...

Wissenswertes · 12. Juni 2024
Die Art und Weise, wie wir Licht wahrnehmen, ist ein faszinierendes Zusammenspiel von relativen und konstanten Faktoren. Unsere Fähigkeit, Helligkeit zu beurteilen, basiert nicht nur auf den tatsächlichen Lichtverhältnissen, sondern auch auf dem Kontext und den Umgebungsbedingungen.
Wissenswertes · 22. Mai 2024
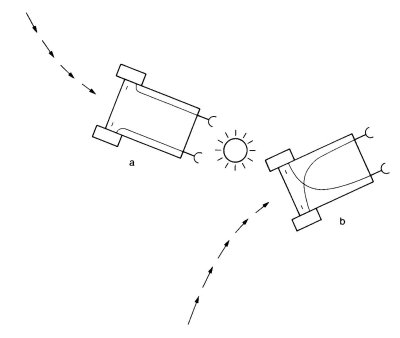
Ein analog gesteuerter Roboter verwendet analoge Schaltkreise, um einfache Ziele zu erreichen, die keine Planung erfordern. Die ersten analogen Roboter wurden 1948 von William Grey Walter gebaut. Sie waren bereits imstande Lichtquellen zu folgen und selbstständig eine Ladestation anzufahren, wenn die Batterie leer wurde.

Wissenswertes · 14. Mai 2024
In der modernen Technologiewelt dominieren Digitalrechner, doch Analogrechner erleben derzeit eine bemerkenswerte Renaissance. Diese alten, aber beeindruckenden Maschinen finden insbesondere in der KI-Forschung wieder Anwendung, vor allem in Bereichen, die hohe Rechenleistungen und niedrigen Energieverbrauch erfordern. Doch warum erleben Analogrechner ein Comeback und was macht sie so besonders?

Wissenswertes · 21. Dezember 2015
Ein Operationsverstärker (OP) ist ein integrierter elektronischer Baustein zur Verstärkung von Spannungen, der eine Vielzahl an Transistoren beinhaltet. Im Grunde ist auch ein HiFi-Audio-Verstärker meist nichts anderes als ein speziell beschalteter OP. Der Name „Operations“-Verstärker stammt aus einer Zeit, als Rechen-„Operationen“ (Addieren, Multiplizieren, Integrieren, Logarithmieren, ...) noch mit analogen Schaltungen durchgeführt wurden und nicht mit digitalen Prozessoren. Der...