

Unser Neujahrswettbewerb hat einen Gewinner! Wir danken für eure kreativen Einsendungen, gute und witzige Ideen waren darunter. Überzeugt hat uns der Beitrag von Miguel aus Offenburg. Gemeinsam mit seinem Vater Michael hat er ein tolles Video eingeschickt.
Wir sind so begeistert davon, dass wir in diesem Blogbeitrag die Steuerung, die die beiden sich überlegt haben, genauer unter die Lupe nehmen möchten. Die Kombination eines Licht- und eines Linienfolgers erschafft einen tibo, der einwandfrei einen Parcours meistert. Dieses schöne Video demonstriert die Vielseitigkeit unseres Miniroboters.
Der Parcours bietet eine besondere Herausforderung: tibo muss eigenständig „umschalten“. Das Verfolgen einer Linie und das Durchfahren eines Parcours erfordern separate Einstellungen, die es nun zu kombinieren gilt. Anschließend soll tibo die schwarze Markierung wiederfinden und schlussendlich vor einem Stoppschild halten.

Die Herausforderung
Die Schaltung, die die beiden Jungs sich dafür ausgedacht haben, setzt sich aus den beiden Grundschaltungen für den Linienfolger und den Lichtfolger zusammen, die in unserer Anleitung beschrieben sind. tibo möchte mit der neuen Schaltung mit den Sensoren T2 und T4 der schwarzen Linie folgen. Gleichzeitig hält er nach Helligkeitsdifferenzen bei den Sensoren T1, T3 und T5 Ausschau, um die Hindernisbahn zu identifizieren. Die größte Schwierigkeit besteht wohl darin, die Steuerschaltung sehr genau zu justieren, ansonsten wüsste der Mini-Bot nicht, was er machen soll. Eine knifflige Denkaufgabe, die jedoch mit Geduld und Experimentierfreude gelöst worden ist.

Wer bereits Erfahrungen mit tibo als Linienfolger sammeln konnte, weiß vielleicht noch, dass tibo nicht nur auf die Linie am Boden, sondern auch auf Objekte vor sich reagiert. Da die Fototransistoren T2 und T4 nach vorne gerichtet sind, versucht er auch Gegenständen zu folgen, die sich vor ihm befinden. Im Parcours ist dies jedoch nicht gewollt, hier muss tibo den Wänden ausweichen, statt in sie hinein zu fahren. Die Sensoren T1, T3 und T5 helfen ihm dabei, den Parcours korrekt zu bewältigen. Anders wiederum am Schluss der Kursstrecke: Hier befindet sich das Stoppschild an einer Wand, tibo muss darauf reagieren und zum Stehen kommen. Eine knifflige Aufgabe, die tibo hier geschafft hat. Gut umgesetzt, sagen wir!
Die Schaltung
Schauen wir uns die Steuerschaltung nun einmal genauer an: Wie bereits erwähnt, sind hier nun alle fünf Sensoren verbaut. Wir sehen auch, dass die Operationsverstärker nun nicht mehr ausschließlich als invertierender oder nicht invertierender Verstärker beschaltet sind. Stattdessen werden sowohl die invertierenden, als auch die nicht invertierenden OP-Eingänge mit variablen Spannungen gesteuert.

Ein erster Ansatz für die Kombination der Signale InR, InL und InM wäre, InR bzw. InL wie beim Lichtfolger auf die invertierenden OP-Eingänge und InM auf die nicht invertierenden OP-Eingänge zu legen. Das dazugehörige Diagramm würde dann so aussehen:
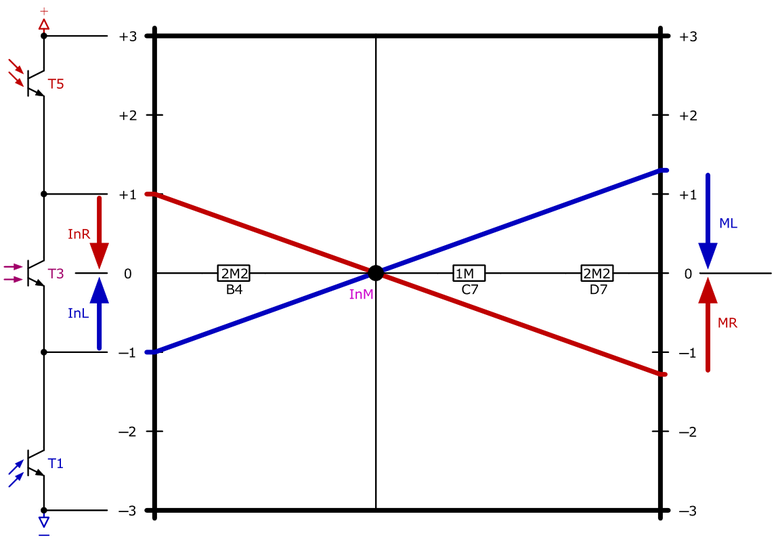
In diesem Fall – bei gleichmäßiger Beleuchtung aller fünf Sensoren – wäre InR positiv (1 V), InL negativ (-1 V) und InM lägen bei 0 Volt. tibo würde rückwärtsfahren, was natürlich nicht gewollt ist.
Die Lösung
Es gibt zwei Möglichkeiten, dies zu korrigieren:
- Der invertierende Eingang von OP1R muss negativer und der invertierende Eingang von OP1L positiver werden: Dafür verbinden wir diese Eingänge über Widerstände mit „Minus“ bzw. „Plus“. Damit die Sensorsignale InR und InL nicht zu sehr unterdrückt werden, wurde eine sehr hochohmige Reihenschaltung mit 10 MΩ + 4.7 MΩ = 14.7 MΩ gewählt. Dieser Zweig liegt nun in Reihe mit den 2.2 MΩ Widerständen von InR bzw. InL. Für InR = 1 V ergibt sich am invertierenden Eingang von OP1R etwa folgende positive Spannung: Uin- = 1 - 4 · 2.2 / (14.7 + 2.2) = 0.48 V tibo fährt immer noch rückwärts, jedoch nur mehr halb so schnell.
- Daher wurde zusätzlich noch die Spannung an den nicht invertierenden Eingängen korrigiert. Dafür wurden die 4.7 MΩ Widerstände an den Positionen A2 eingesetzt. Auch hier teilt sich die Spannung zwischen 3 V und 0 V am nicht invertierenden Eingang von OP1R gemäß den Widerständen auf. Das Poti ist auf 10 MΩ eingestellt und wird bei folgender Betrachtung vernachlässigt: Uin+ = 0 + 3 · 2.2 / (4.7 + 2.2) = 0.96 V
Voilà: Uin+ ist nun etwas positiver als Uin- ist. Soll nun die Spannung an den Motoren bestimmt werden, kann man die Verstärkung der Schaltung berechnen oder das Diagramm benutzen. Auch hierbei werden die hochohmigen Widerstände mit 14.7 MΩ vernachlässigt. Für die Ausgangsspannung für den rechten Motor ergibt sich:
Uout = 0.96 V + (0.96-0.48) · (2.2 + 1) / 2.2 = 1.66 V

tibo würde also ohne äußere Einflüsse mit etwas mehr als der halben Geschwindigkeit vorwärts fahren. Betrachten wir nun noch die symmetrischen aber extremen Fälle, wenn der mittlere Sensor T3 sehr hell (a) oder gar nicht (b) beleuchtet wird. InR wäre in diesen beiden Fällen a) 0 V bzw. b) 3 V.
Für Uin- ergibt sich wie gehabt:
a) Uin- = 0 - 3 · 2.2 / (14.7 + 2.2) = -0.39 V
b) Uin- = 3 - 6 · 2.2 / (14.7 + 2.2) = 2.22 V
Für Uout ergibt sich dann entsprechend:
a) Uout = 0.96 V + (0.96+0.39) · (2.2 + 1) / 2.2 = 2.92 V
b) Uout = 0.96 V + (0.96-2.22) · (2.2 + 1) / 2.2 = -0.87 V
Nun sehen wir schön: Wenn tibo im Parcours unterwegs ist und die seitlichen Sensoren T1 und T5 durch die Wände abgedunkelt sind, (a) fährt er mit fast maximaler Geschwindigkeit (2.92 V) vorwärts.
Im umgekehrten Fall steht tibo vor einer Wand, so wie das am Schluss des Parcours der Fall ist, sodass T1 und T5 beleuchtet sind und nur T3 abgedunkelt ist. In diesem Fall (b) fährt tibo langsam rückwärts (-0.87 V), bis er einen entsprechenden Abstand zur Wand eingenommen hat und zum Stillstand kommt.
Die Rückkopplung
Bei der Grundschaltung des Linienfolgers aus der tibo-Anleitung sind beide OPs übersteuert, wenn tibo in der Mitte auf der Linie fährt. Damit wurde ein hin und her Schwingen vermieden. Weil bei dieser beschriebenen Schaltung tibo die Geschwindigkeit beliebig wählen kann, auch wenn er auf der Linie unterwegs ist, mussten unsere Gewinnspielteilnehmer sich etwas Neues einfallen lassen, um ein Schwingen zu unterdrücken. Sie haben im Rückkopplungszweig der Schaltung zum 2.2 MΩ Widerstand D7 und zum 47 nF Kondensator D8 einen 1 MΩ Widerstand C7 in Reihe angeordnet. Das haben wir bei der Berechnung der Verstärkung bereits berücksichtigt. Der Kondensator dämpft bzw. verzögert dadurch nur den Teil des endgültigen Ausschlags am OP-Ausgang, der dem 2.2 MΩ Widerstand entspricht. Der andere Teil des Signals wird ohne Verzögerung an die Motoren weiter gegeben.
Diese Kombination macht Sinn: So kann tibo spontan auf schnelle Änderungen reagieren, ohne jedoch über zu reagieren und dabei ins Schwingen zu geraten. Vor allem beim Linienfolgen macht sich das bezahlt.
Noch ein Tipp zum Linienfolger

Habt ihr zuhause bereits alles auf energiesparende LED-Beleuchtung umgestellt? Dann habt ihr evtl. festgestellt, dass tibos Infrarot-Fototransistoren das kalte Licht nicht so gut wahrnehmen und das Linienfolgen nicht so gut funktioniert. Wenn euer Roboter nicht auf Tageslicht angewiesen sein soll, so gibt es einen einfachen Trick, wie tibo die Linie selbst beleuchten kann: Dazu trennt die blaue und die rote Platine voneinander und holt die beiden roten LEDs, die den Ladezustand der Batterien anzeigen aus ihrem Sockel. Biegt dann mit einer kleinen Zange die Beinchen so um, dass die LEDs schräg zum Boden hin gerichtet sind. So funktioniert das Linienfolgen dann sogar im Dunkeln ganz prima!
Miguel und sein Vater haben mit ihrem Video eindrucksvoll gezeigt, dass man mit tibo auch kniffelige Aufgaben lösen kann, die man einem rein analog gesteuerten Roboter nicht so ohne Weiteres zutrauen würde. Dafür hat haben sie sich den Gewinn wirklich verdient, finden wir. Wir hoffen, sie freuen sich über den weiteren tibo. Jetzt können sie ihre Experimente um das Verhalten zweier Miniroboter erweitern.
Wir freuen uns natürlich auch ohne ein Gewinnspiel, wenn ihr eure Ideen oder Videos mit uns teilen möchtet. Vielleicht habt ihr hier eine kleine Inspiration erhalten, die ihr nun gerne ausprobieren wollt. Ran an die tibos!
Hat dir der Blogbeitrag gefallen?
Abonniere unseren Newsletter oder Folge uns auf Facebook um zukünftig keinen Blog mehr zu verpassen.
Diesen Beitrag teilen
Kommentar schreiben
Dieter Groß (Montag, 15 Februar 2016 10:42)
Im Vergleich zu den Schaltungen "Lichtfolger" und "Linienfolger" aus "Analoge Steuereinheit für mobile Roboter" werden hier die zweiten OPs ( OP2R und OP2L ) nicht benutzt.
Warum nicht?
Viele Grüße
Dieter
Tino Werner (Montag, 15 Februar 2016 12:37)
Eine gute Frage!
Beim tibo-Bausatz wird tatsächlich nur ein Operationsverstärker je Motor verwendet, der nach Plus oder Minus aussteuern kann. Der andere Kontakt vom Motor liegt auf Masse. Die Schaltung ist daher sehr übersichtlich. tibo verwendet dafür zwei Batterieeinheiten mit je zwei Zellen (eine von Masse auf Plus und eine von Masse auf Minus).
Die anderen beiden OPs stehen bei tibo zum Ansteuern der IR-LEDs zu Verfügung. Das wird in der dritten Grundschaltung in der Anleitung erklärt.
Will man die Steuereinheit mit anderen Motoren auf die gleiche Weise verwenden, so würde man auch zwei Batterieeinheiten mit jeweils der Nennspannung der Motoren benötigen.
Alternativ kann man aber auch für den jeweiligen zweiten Motorkontakt den 2. OP verwenden, der dann gegengleich zum ersten OP aussteuert. Damit erhält man die doppelte Betriebsspannung und hat mehr Möglichkeiten für die Gestaltung der Steuerung. Steuern z.B. beide OPs eines Motors maximal nach Plus aus, so befindet sich dieser Motor im stabilen Stillstand.
Viele Grüße,
Tino